The main goal of the SAFESPOT (FP6-2004-IST-4 026963 Cooperative systems for road safety „Smart vehicles on smart roads”) project was to develop a system increasing road traffic safety level by supporting driver decisions. The members of IoT System Research Team took part in SINTECH (SAFESPOT Innovative Technologies) subproject activities related to vehicles localization.
Localization system
Our activities resulted in development of an UWB-based localization system demonstrator composed of:
- UWB transmitters (IPU – Infrastructure Positioning Units) attached to the road infrastructure in fixed positions,
- UWB receivers (VPU – Vehicle Positioning Units) located in vehicles.
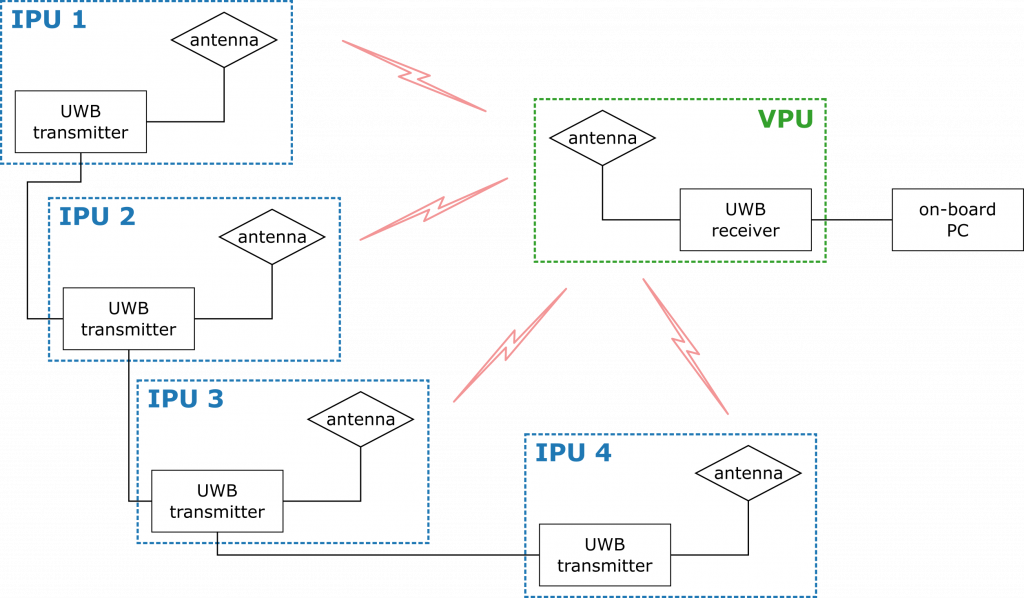
System architecture
A single IPU consists of an UWB transmitter and an attached ultra-wideband antenna. The IPUs are synchronized over cable connection (Ethernet cables are used). The IPUs transmit signals, which are received by the VPU mounted in the test car. The VPUs registers the signals’ times of arrival and passes the results to the on-board PC, which determines the vehicle location using TDOA (Time Difference of Arrival) technique.
The system was tested in a parking lot using a set of five IPUs and one VPU. The experiments were performed in cooperation with Technical University of Chemnitz and consisted in driving along a test trajectory. The car was additionally equipped with Leica 1200 DGPS navigation system which acted as reference for the obtained UWB-based results.

Vehicle Positioning Unit mounted on the test car

Infrastracture Positioning Unit deployed at the test site
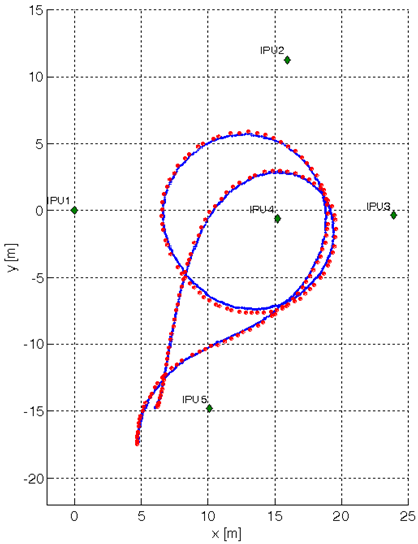
Localization results: red dots are the reference results obtained using DGPS system, blue line represents the trajectory determined using the SAFESPOT UWB-based localization system
Related publications:
- T. Kosilo, J. Kolakowski and Z. Walczak, “Project Safespot (Smart Vehicles on Smart Roads),” 2006 International Conference on Microwaves, Radar & Wireless Communications, Krakow, 2006, pp. 215-215. 10.1109/MIKON.2006.4345145