Our research is focused on real-life application of IoT solutions and positioning systems, so measurement campaigns are an integral part of our activities. Below, we have listed datasets, which are publicly available and can be used in your research. Please remember to cite the datasets and consider citing the original papers, for which they were used.
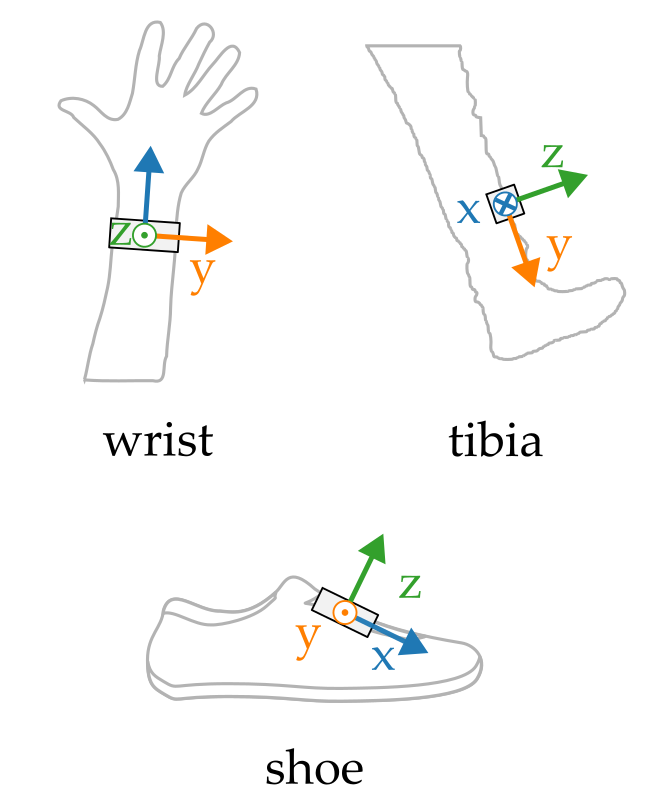
Wrist and Tibia/Shoe Mounted IMU Measurement Results for Gait Analysis
The dataset contains measurement results collected using wrist, tibia and shoe mounted inertial sensors. The main purpose of the dataset was to test signal translation algorithms converting signals registered using the wrist-worn sensor e.g. a smartwatch to signals which would be measured with a shoe or tibia – mounted device. The dataset includes tri-axial acceleration and angular velocity registered during several walks.
Download the dataset from Zenodo
Original paper: 10.3390/s24010293
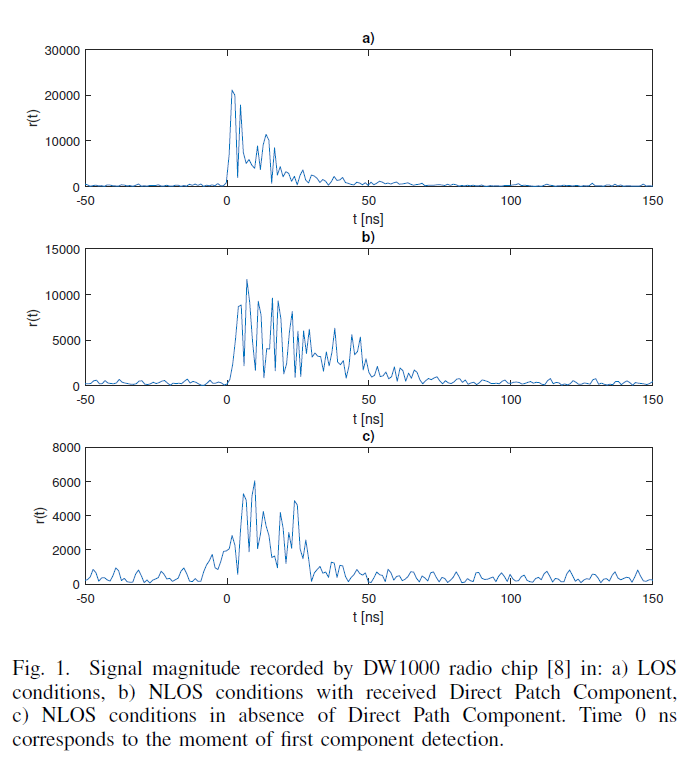
UWB Channel Impulse Responses Registered in a Furnished Apartment
This dataset contains ultra-wideband (UWB) channel impulse responses (CIR) registered in a fully furnished apartment. The data were primarily used to assess the effectiveness of an Non-Line-of-Sight (NLOS) detection algorithm.
The CIRs were collected using Decawave EVK1000 Evaluation Kit for 57 different modules’ geometric configurations (at least 100 CIRs for each configuration). Besides the CIR measurements, the modules performed ranging. The results were saved using the DecaRanging application.
Download the dataset from Zenodo
Original paper: 10.23919/MIKON.2018.8405190
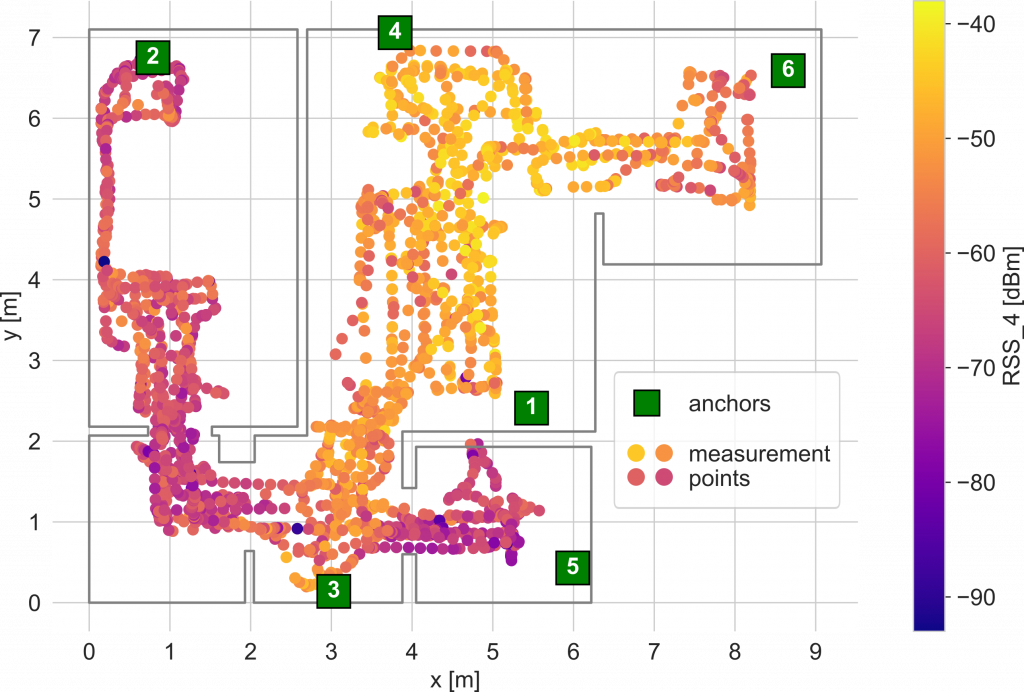
BLE RSS dataset for fingerprinting radio map calibration
The dataset contains Bluetooth Low Energy signal strengths measured in a fully furnished flat. The dataset was originally used in the study concerning RSS-fingerprinting based indoor positioning systems. The data were gathered using a hybrid BLE-UWB localization system, which was installed in the apartment and a mobile robotic platform equipped for a LiDAR. The dataset comprises power measurement results and LiDAR scans performed in 4104 points. The scans used for initial environment mapping and power levels registered in two test scenarios are also attached.
The set contains both raw and preprocessed measurement data. The Python code for raw data loading is supplied.
Download the dataset from Zenodo
Original paper: https://doi.org/10.3390/s21186270